Register Any Point:
Scaling 3D Point Cloud Registration by Flow Matching
Accomplish single-stage multi-view point cloud registration at various scales by flow matching-based generation
Overview
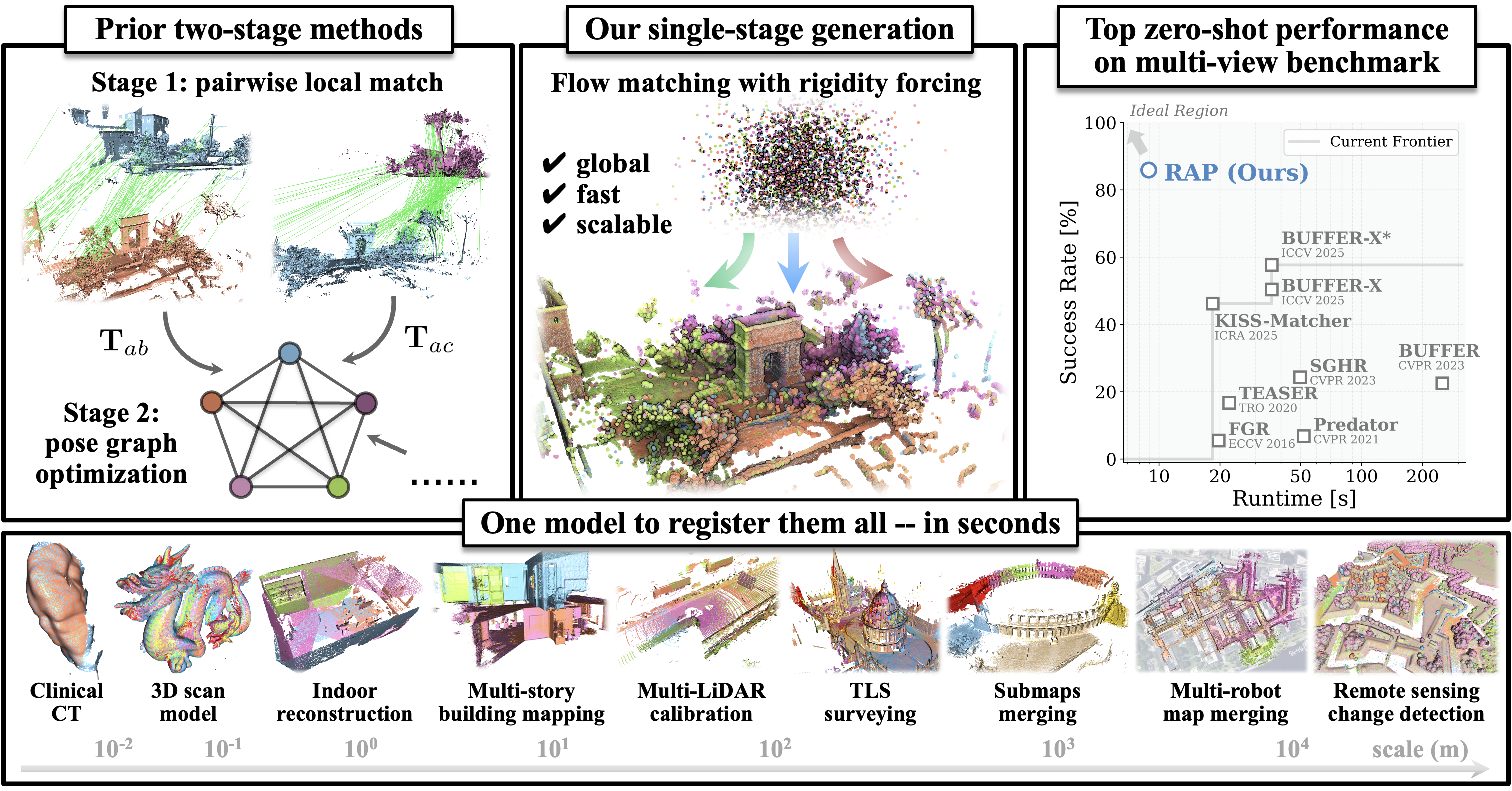
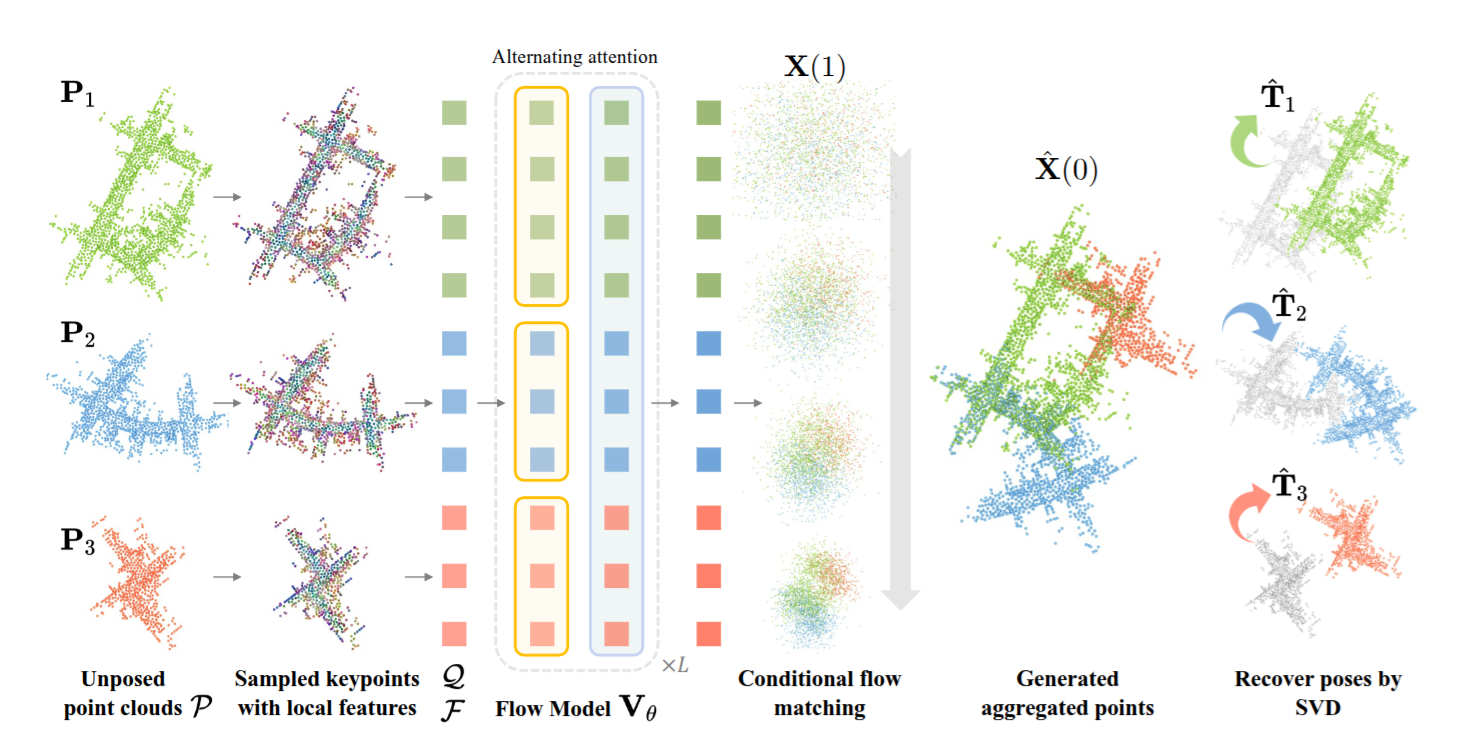
Our method for scalable multi-view point cloud registration. Prior works perform pairwise registration via correspondence matching and then conduct pose graph optimization (top-left). We use a single-stage flow matching model to generate the registered points (top-middle). Our model RAP generalizes across various view counts, scales, and sensor modalities (bottom) and achieves superior zero-shot performance with the shortest runtime on the cross-domain multi-view registration benchmark (top-right).
Acknowledgments
This work is built upon Rectified Point Flow. We also thank the authors of the following works: BUFFER-X and GARF.